Jan 2024 – Apr 2024/AcademicCompleted
Autonomous Ball-Collection Robot
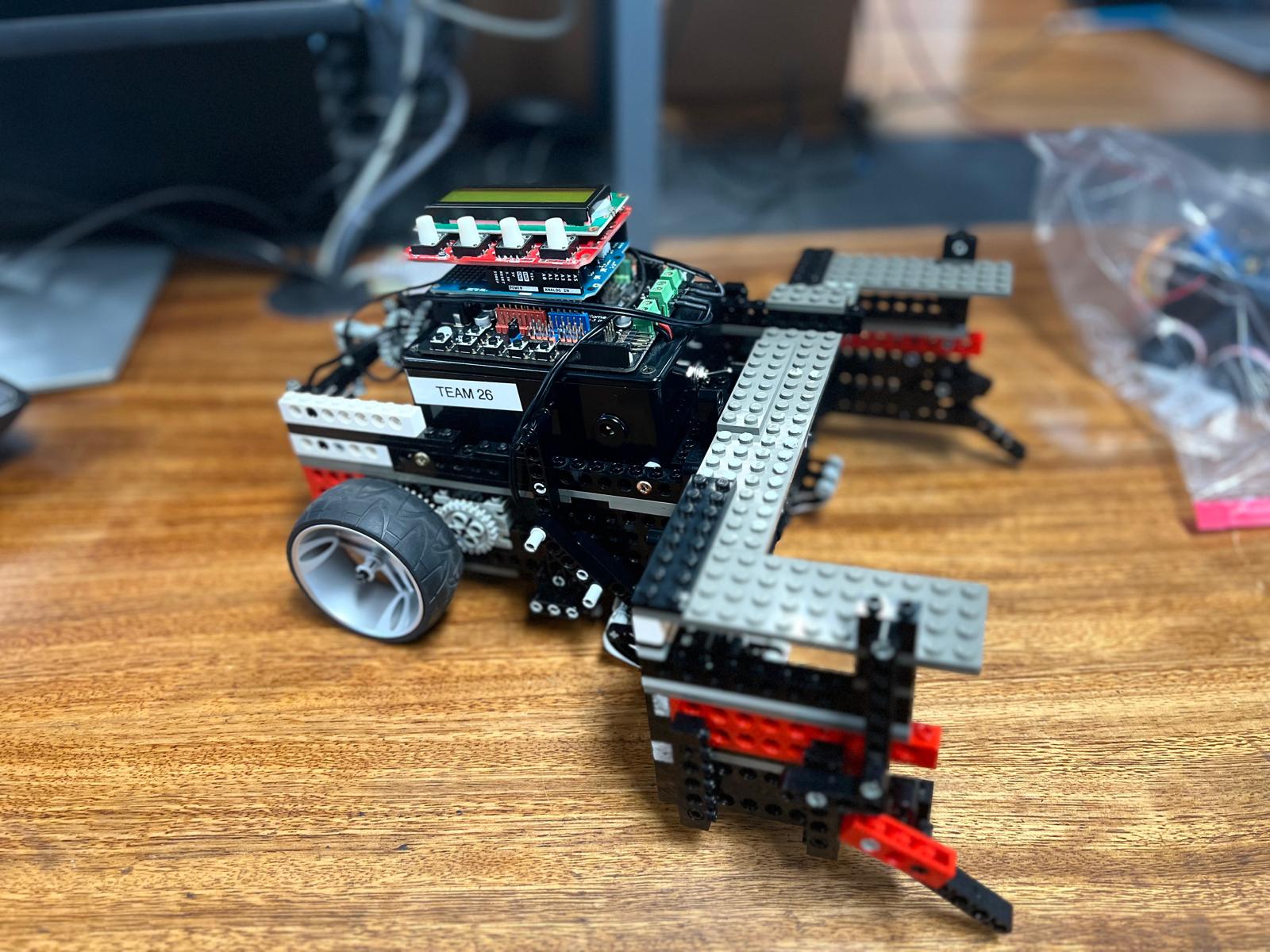
Multidisciplinary academic project spanning mechanical development, electronic control, and embedded programming to build an autonomous ball-collection robot.
Highlights
- Engineered an autonomous robot capable of locating, collecting, and returning a specified number of balls to its designated home zone.
- Iterated through multiple drivetrain concepts via rapid prototyping and testing, balancing speed, available torque, and repeatable traction before converging on a sled-style configuration.
- Redesigned the front mechanical support, replacing the front wheel with low-friction ski pads to reduce lateral resistance during turning and improve manoeuvrability.
- Defined the overall competition strategy and implemented sensor-feedback logic in the firmware to support reliable autonomous behaviour.
Tags
RoboticsMechanical DesignEmbeddedRapid PrototypingSensor Integration
Gallery
Videos
Robot Competition Run
Autonomous Ball-Collection Demo